
Neuronowe sieci konwolucyjne 2: architektura
Neuronowe sieci konwolucyjne pozwalają uzyskać bardzo dobre wyniki klasyfikacji w przypadku obrazów. W poprzednim poście mieliście okazję dowiedzieć się, czym jest konwolucja oraz jak sklasyfikować zbiór CIFAR-10 wykorzystując prostą klasyczną sieć neuronową. Przypomnę, że uzyskaliśmy poprawność klasyfikacji na zbiorze testowym na poziomie 47%.
W drugiej części tutoriala idziemy dalej:
- wyjaśniamy podstawowe pojęcia i architekturę neuronowych sieci konwolucyjnych,
- budujemy prostą sieć konwolucyjną i sprawdzamy jak radzi sobie ona na zbiorze CIFAR-10,
- wstępnie wyjaśniamy czym jest overfitting – zagadnienie, z którym będziemy mierzyli się w części trzeciej.
Niniejszy post jest drugą częścią tutoriala, więc jeżeli nie czytaliście części pierwszej, zapraszam najpierw do jej lektury.
Neuronowe sieci konwolucyjne – architektura
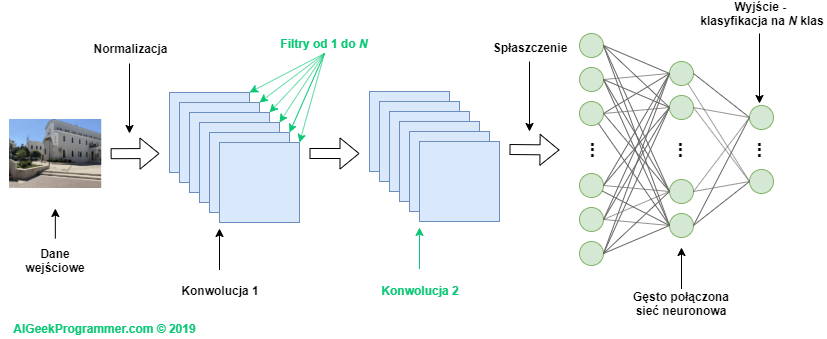
Zacznijmy od tego, że sieć konwolucyjna składa się de facto z dwóch podsieci. Pierwsza z nich dokonuje konwolucji tensora wejściowego. Druga jest klasyczną, gęsto połączoną siecią neuronową, zakończoną warstwą, która klasyfikuje dane wejściowe na N klas – jak w przykładzie z pierwszej części tutoriala.

Rysunek 1 – neuronowe sieci konwolucyjne: wysokopoziomowa architektura
Podsieć konwolucyjna wykorzystuje z reguły dane trójwymiarowe, czyli nieprzetworzone (poza ich normalizacją). Sieć neuronowa wymaga natomiast danych spłaszczonych do jednego wymiaru. Przyjmując taki nieco sztuczny podział na podsieci i wiedząc z pierwszej części tutoriala oraz z innych moich postów, jak klasyfikować dane z wykorzystaniem klasycznej sieci neuronowej, możemy się w zasadzie skupić na pierwszym elemencie, czyli podsieci konwolucyjnej.
Zanim wejdziemy głębiej w architekturę sieci konwolucyjnej, zastanówmy się przez chwilę dlaczego dobrze radzą sobie one z obrazkami? Jeżeli czytaliście mój post o klasyfikacji pisma odręcznego, to być może pamiętacie, że wszystkie cyfry były mniej więcej w centrum obrazka. Wyglądało to tak:

Sieć neuronowa dobrze radziła sobie z klasyfikacją, mając gwarancję, że to, co najbardziej interesujące znajdzie się zawsze w centrum obrazka.
Co jednak, jeśli cyfra byłaby przesunięta w którąś stronę?

Prawdopodobnie klasyczna sieć neuronowa, w dodatku wyuczona na centralnie umiejscowionych cyfrach, nie byłaby w stanie poradzić sobie z takimi danymi. W języku angielskim istnieje termin „translational invariance” – dosłownie „niezmienność tłumaczenia”. Lepiej i zdecydowanie bardziej sensownie według mnie brzmi „niewrażliwość na zmiany położenia”. Termin ten oznacza, że potrafimy rozpoznać obiekt jako ten właściwy obiekt, nawet jeżeli jego wygląd lub położenie w pewnym stopniu uległo zmianie: poprzez przesuniecie, rotację, zmianę wielkości, kolorów, jasności, itp. Jak w przykładzie powyżej, kiedy zero przesunęliśmy w lewy górny róg, a mimo to dla ludzkiego mózgu jest to nadal bezsprzecznie zero. Dla sieci neuronowej niemającej cechy „translational invariance” będzie to obiekt inny niż zero – prawdopodobnie niemożliwy do sklasyfikowania dla sieci wyuczonej na symbolach wypośrodkowanych. Warto zauważyć, że słowo „translational” jest nieco mylące. Nie chodzi tu wcale o tłumaczenie, ale bardziej o tranzycję. Zostało wzięte z geometrii, gdzie oznacza przesunięcie każdego piksela w ten sam sposób.
ConvNety są niewrażliwe na położenie, ponieważ ich centralnym elementem jest operacja konwolucji, która polega na przetworzeniu każdego fragmentu obrazu przez tą samą wartość filtra. Innymi słowy: konwolucja nie patrzy na centrum obrazka, czy na jakikolwiek inny jego obszar. Przebiega ona filtrem przez całą jego powierzchnię, a tam gdzie akurat znajdzie jakaś interesująca cecha, w wyniku konwolucji pojawią się charakterystyczne wartości.

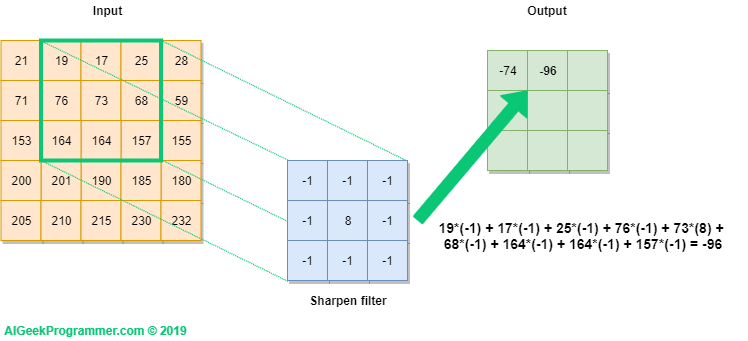
Rysunek 2 – Konwolucja krok pierwszy
Rysunek nr 2 prezentuje w formie graficznej w jaki sposób realizujemy operację konwolucji na obrazku 5×5 pikseli, oznaczonym jako Input, wykorzystując do tego filtr o rozmiarze 3×3 i wartościach, które już pojawiły się w pierwszej części tutoriala przy okazji wyostrzania krawędzi obrazka. Filtr jest rzutowany na obrazek (zielona ramka), a następnie wartość każdego piksela obrazka jest przemnażana przez odpowiadającą mu wartość filtra. W rezultacie otrzymujemy wartość -74. Obliczenia dla ułatwienia zapisałem pod outputem.
W kolejnym kroku filtr jest przesuwany o jedną pozycję i obliczenia są powtarzane. Jako wynik otrzymujemy wartość -96.
Rysunek 3 – Konwolucja krok drugi
Dla ostatniego kroku uzyskujemy wartość -43, jak pokazano na rysunku 4 poniżej.

Rysunek 4 – Konwolucja krok dziewiąty
Filtr przebiega po całym inpucie, od lewej ku prawej i z góry na dół, ostatecznie wypełniając wartościami całość outputu.
Rysunek 5 – przechodzenie filtra po obrazku
Jak widać, w wyniku konwolucji obrazka możemy uzyskać wartości zarówno poniżej zera, jak i większe niż 255. Pamiętajmy jednak, że celem konwolucji w sieci neuronowej jest detekcja cech obrazka, a nie jego wizualizacja po przetworzeniu filtrem. Stąd nie ma to w zasadzie znaczenia do momentu, kiedy chcemy wyświetlić obrazek po konwolucji (a w trakcie procesu uczenia dzieje się tak w zasadzie rzadko). W takim przypadku powinniśmy w pierwszej kolejności dokonać przesunięcia wartości, a dopiero w drugim kroku obcięcia tych powyżej 255 do 255, a tych poniżej 0 do wartości 0. Zagadnienie, o jaką wartość należy dokonać przesunięcia, jest dość skomplikowane i wykracza poza zakres tego tutoriala. Zainteresowanych odsyłam w pierwszej kolejności do tego wątku na stackoverflow.
Podsumowując, dane po konwolucji stają się niewrażliwe na położenie obiektu. Bez względu na to, gdzie będzie on zlokalizowany, konwolucja będzie w stanie go znaleźć i zwrócić dla niego charakterystyczny zestaw danych. Zestaw rozpoznawalny potem przez sieć neuronową. W tym rozumieniu ConvNety są niewrażliwe na zmiany położenia obiektu i jest to jeden z głównych powodów, dla których tak doskonale radzą sobie z klasyfikacją obrazów.
Podobnie jak podsieć neuronowa, podsieć konwolucyjna może być wielowarstwowa. Oznacza to, że każda kolejna warstwa jest w stanie znaleźć kolejne właściwości obrazka (z ang. features). Co więcej, każda warstwa konwolucji również jest wielowymiarowa, bo dla każdej warstwy definiuje się N filtrów (patrz rysunek 6). Wartości filtrów są różnie zainicjowane dla każdego z nich i mogą one dzięki temu lepiej lub gorzej znajdować cechy obrazka istotne dla poprawnej klasyfikacji. Algorytm propagacji wstecznej będzie obniżał istotność filtrów nieskutecznych, a promował te wspomagające prawidłową klasyfikację. Stąd po wielu, wielu iteracjach będziemy dysponowali zestawem skutecznych filtrów. Skutecznych – w znaczeniu pomagających sieci poprawnie klasyfikować obrazek, a ostatecznie poprawnie generalizować proces klasyfikacji.
Rysunek 6 – wielowarstwowa sieć konwolucyjna
Innym istotnym elementem Convnetów jest wykonywanie tzw. operacji maxpoolingu. Czym jest maxpooling również najlepiej wyjaśnić jest graficznie.

Rysunek 7 – operacja maxpoolingu
Analizujemy wartości czterech sąsiadujących pikseli, wybieramy wartość największą i ona staje się wyjściem/wynikiem operacji. W kolejnym kroku okno operacji przesuwamy na następną grupę pikseli i powtarzamy obliczenia. W przeciwieństwie do konwolucji okna wykonywania maxpoolingu nie nachodzą na siebie. Stąd w naszym przykładzie kolejnym oknem będą piksele: 114, 105, 182 oraz 75.
Maxpooling możemy również wykonać na większej próbce np. 3×3, 4×4, itd. Warto zwrócić uwagę, że maxpooling o wielkości M x M redukuje wymiar obrazka o M2. Czyli obrazek 32 x 32 (1024 piksele), po wykonaniu maxpoolingu 2×2 będzie miał wymiar 16×16 = 256 pikseli, czyli 22 mniej.
W jakim celu wykonujemy maxpooling? Główny powód poznaliście już powyżej. Następuje redukcja wymiarowości i to bez utraty informacji istotnych dla klasyfikacji, dzięki czemu problem upraszcza się obliczeniowo. Po wykonaniu konwolucji (tu w znaczeniu: po nałożeniu filtra na dany obszar obrazka) interesuje nas jedynie, czy istotna cecha została w danym obszarze znaleziona czy nie. Nie interesuje nas każda pojedyncza wartość piksela po konwolucji, a tylko te wartości, które dają silną odpowiedź (wskazówkę) naszej sieci. Dlatego patrzymy na wartości sąsiadujących pikseli i wybieramy z nich wartość największą – najbardziej istotną. Dodatkowo, maxpooling pomaga zidentyfikować te elementy obrazka, które są najbardziej widoczne. Dzięki temu osiągamy również wyższy poziom „translational invariance”.
Poza operacją maxpoolingu są jeszcze operacje average poolingu (zamiast wartości maksymalnej wyliczamy średnią) i minpoolingu, ale nie znajdują one szerokiego zastosowania w Convnetach.
Wymiarowanie sieci konwolucyjnych
Jak być może zwróciliście uwagę podczas oglądania rysunków od 2 do 5, operacja konwolucji na obrazku o rozmiarze 5×5, filtrem 3×3 dała w efekcie nowy „obrazek” o wielkości 3×3. Stąd prosty wniosek, że konwolucja może zmieniać wymiary przetwarzanych danych i warto zrozumieć, w jaki sposób wymiary te się zmieniają oraz jak te zmiany kontrolować. Ponieważ na blogu staram się korzystać z API biblioteki Keras, to za przykład posłuży mi linia kodu, którą zobaczymy później, a która definiuje parametry jednej z warstw konwolucyjnych:
Convolution2D(filters=32, kernel_size=(3,3), activation='relu',padding='same')
Powyższy kod tworzy warstwę konwolucyjną mającą 32 filtry, każdy o wymiarze 3×3, a wyjście z warstwy dodatkowo przechodzi przez funkcję aktywacji relu. Dla omawianego problemu istotna jest opcja padding, tu ustawiona na wartość same, co oznacza, że po konwolucji obrazek będzie miał niezmienioną wielkość. Jak to możliwe? Jak sama nazwa sugeruje używamy do tego sztucznie dodanego marginesu (paddingu), wypełnionego zerami. Keras i Tensorflow oferują dwa sposoby obsługi marginesów: same i valid.
Tryb valid widzieliśmy na przykładach pokazanych na rysunkach od 2 do 5. Filtr nie wychodzi wówczas poza obszar obrazka i co za tym idzie, obrazek wyjściowy jest mniejszy. Jest na to nawet prosty wzór. Jeżeli obrazek ma wielkość D x D (w naszym przykładzie 5 x 5), a filtr jest wielkości N x N (tu: 3 x 3), to wielkość wynikowego obrazka wyliczymy ze wzoru: D – N + 1. Dla naszego przykładu będzie to 5 – 3 + 1 = 3.
Tryb same zachowuje wielkość obrazka po przetworzeniu przez konwolucję. Zatem wejście i wyjście z warstwy konwolucji będzie tej samej wielkości. Aby to osiągnąć, Keras i inne frameworki dobierają wielkość marginesu, tak aby filtr przeszedł po obrazku z marginesem tyle razy, ile wynosi wymiar obrazka wejściowego. W naszym przypadku do obrazka o wymiarach 5 x 5 Keras doda po jednym pikselu marginesu (paddingu).
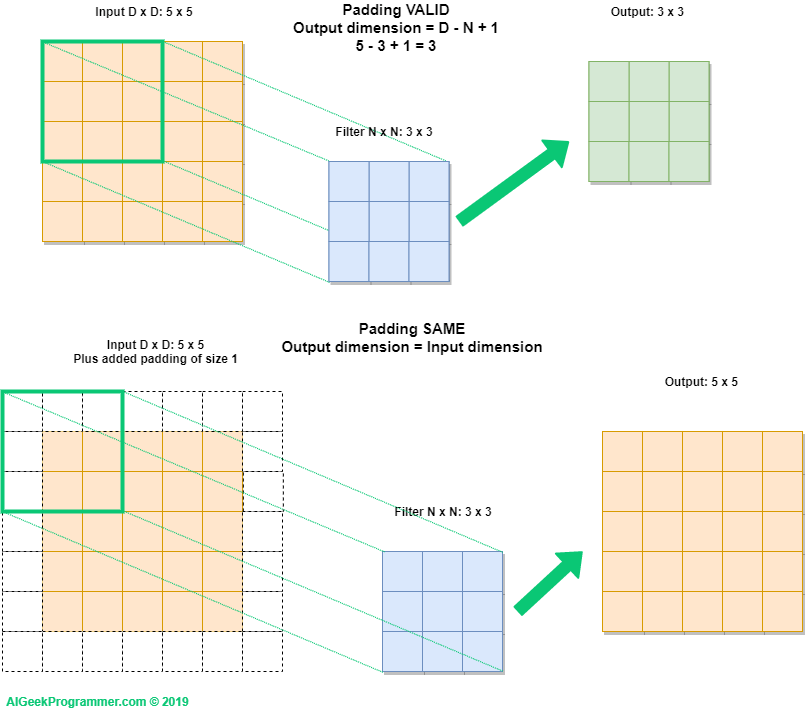
Rysunek 8 – rodzaje paddingu
Warto dodać, że dla małych obrazków – takich jak w zbiorze CIFAR-10 – warto stosować padding = „same”, aby wielkość obrazka wyjściowego z konwolucji nie spadła za szybko, bo wówczas nie będziemy mieli możliwości dodania drugiej i kolejnych warstw konwolucyjnych lub wykonania maxpoolingu.
Przykład wymiarowania
Na podstawie tego, czego dowiedzieliśmy się powyżej, spróbujmy prześledzić wymiary w prostej sieci konwolucyjnej. Załóżmy, że będzie się ona składała z 3 operacji konwolucji, dwóch operacji maxpoolingu oraz dwóch klasycznych warstw, gęsto połączonych. Ponadto:
- Conv1: padding = „valid”, rozmiar filtra: 5×5, ilość filtrów: 16
- Maxpool1: 2×2
- Conv2: padding = „same”, rozmiar filtra: 3×3, ilość filtrów: 8
- Maxpool2: 2×2
- Conv3: padding = „valid”, rozmiar filtra: 3×3, ilość filtrów: 4
- Dense1: ilość neuronów na wyjściu: 50
- Dense2: ilość neuronów na wyjściu: 10 (klasyfikujemy na 10 klas)
Zakładając, że na wejściu mamy obrazek ze zbioru CIFAR-10, jak będą zmieniały się rozmiary?
- Conv1: obrazek ma rozmiar 32x32x3 i wykonujemy na nim konwolucję filtrem 5×5 w trybie valid. Tu należy zauważyć, że filtr 5×5 jest nakładany na każdy kanał koloru i sumowany. Rozmiar tensora wynikowego będzie zatem 32-5+1 = 28×28. Filtrów jest 16. Stąd wyjściem z Conv1 będzie tensor o wymiarze 28x28x16.
- Maxpool1: zmniejszy dwukrotnie rozmiar każdego z wymiarów. Stąd wyjściem z tej warstwy będzie tensor 14x14x16.
- Conv2: w tej warstwie wykonujemy konwolucję w trybie same, a więc nie zmieni ona wymiarów obrazka. Filtrów jest 8. Stąd wyjściem z Conv2 będzie tensor o wymiarze 14x14x8.
- Maxpool2: zmniejszy dwukrotnie rozmiar każdego z wymiarów. Stąd wyjściem z tej warstwy będzie tensor 7x7x8.
- Conv3: wykonujemy konwolucję w trybie valid, filtrem 3×3. Rozmiar tensora wynikowego będzie zatem 7-3+1 = 5×5. Filtry są 4. Stąd wyjściem z Conv3 będzie tensor o wymiarze 5x5x4.
- Dense1: aby przejść do klasycznej podsieci neuronowej musimy dane spłaszczyć. W efekcie otrzymamy wektor o wymiar 5*5*4 = 100. Będzie on wejściem do pierwszej warstwy podsieci neuronowej. Ma ona na wyjściu 50 neuronów i taki będzie rozmiar wektora wejściowego do ostatniej warstwy.
- Dense2: na wejściu otrzymuje daną o rozmiarze 50, na wyjściu ma 10 neuronów, które klasyfikują wynik funkcją softmax.
Neuronowe sieci konwolucyjne – klasyfikacja zbioru CIFAR-10
Myślę, że wystarczy już tej teorii. 😉 Jesteśmy gotowi, aby spróbować zbudować prostą sieć konwolucyjną i sklasyfikować z jej użyciem zbiór CIFAR-10. Zobaczymy czy uda nam się pobić poprzedni wynik (47%), uzyskany z wykorzystaniem klasycznej sieci neuronowej. A jeśli tak, to o ile.
Do prac użyję tym razem środowiska Google Colaboratory, gdzie mamy łatwy dostęp do procesora GPU.
Ponieważ chcę skorzystać z tensorflow 2.x, a w dniu pisania posta (grudzień 2019) domyślną wersją w Colab jest nadal 1.x, to poza standardowymi importami, w notebooku należy dodać wskazanie na oczekiwaną wersję biblioteki Tensorflow:
import numpy as np
%tensorflow_version 2.x
import tensorflow
import matplotlib.pyplot as plt
%matplotlib inline
>>> TensorFlow 2.x selected.
Importujemy bibliotekę Keras, zbiór cifar-10 i normalizujemy dane w przedziale od -0.5 do 0.5:
from tensorflow import keras
print(tensorflow.__version__)
print(keras.__version__)
>>> 2.1.0-rc1
>>> 2.2.4-tf
from tensorflow.keras.datasets import cifar10
(x_train,y_train), (x_test,y_test) = cifar10.load_data()
x_train.shape
>>> (50000, 32, 32, 3)
print(x_train.min(), "-", x_train.max())
>>> 0 - 255
x_train = (x_train / 255.0) - 0.5
x_test = (x_test / 255.0) - 0.5
print(x_train.min(), "-", x_train.max())
>>> -0.5 - 0.5
W dalszej kolejności importujemy klasy, które będą nam potrzebne do zbudowania i nauczenia modelu:
from tensorflow.keras.models import Sequential
from tensorflow.keras.optimizers import SGD
from tensorflow.keras.layers import Convolution2D, MaxPool2D, Flatten, Dense
from tensorflow.keras.utils import to_categorical
Czas na zbudowanie modelu z zaimportowanych klas. Budowa modelu z wykorzystaniem API Keras jest prosta i możecie eksperymentować z różnymi wariantami architektury. Nieco gorzej z szybką diagnozą, czy zmiany są na korzyść czy nie. Nawet takie proste sieci konwolucyjne wymagają sporych mocy obliczeniowych.
Co do architektury zaproponowanej przeze mnie, to będzie ona składała się z:
- dwóch podsieci konwolucyjnych, każda z 64 filtrami,
- warstwy MaxPool 2×2,
- kolejnych dwóch podsieci konwolucyjnych, każda z 32 filtrami,
- drugiej warstwy MaxPool 2×2,
- ostatniej pary podsieci konwolucyjnych, z 16 filtrami każda.
Ponieważ obrazki w zbiorze Cifar-10 są niewielkich rozmiarów, to wszystkie warstwy konwolucyjne operują filtrem 3×3 oraz stosują padding w trybie same, aby nie zmniejszyć za szybko rozmiaru przetwarzanych danych.
Jako, że każda warstwa konwolucyjna (podobnie jak klasyczna, gęsto połączona) jest warstwą liniową, to do wyjścia każdej z nich dodajemy funkcję aktywacji, która wprowadza nam dodatkową nieliniowość – tak lubianą przez sieci neuronowe.
Podsieć gęsto połączona oczekuje danych spłaszczonych, stąd warstwa Flatten.
Model kończą trzy warstwy Dense, z których dwie pierwsze mają funkcję relu jako aktywację, a trzecia klasyfikuje odpowiedź do jednej z 10 klas, wykorzystując funkcję softmax.
model = Sequential([
Convolution2D(filters=64, kernel_size=(3,3), input_shape=(32,32,3), activation='relu', padding='same'),
Convolution2D(filters=64, kernel_size=(3,3), activation='relu', padding='same'),
MaxPool2D((2,2)),
Convolution2D(filters=32, kernel_size=(3,3), activation='relu', padding='same'),
Convolution2D(filters=32, kernel_size=(3,3), activation='relu', padding='same'),
MaxPool2D((2,2)),
Convolution2D(filters=16, kernel_size=(3,3), activation='relu', padding='same'),
Convolution2D(filters=16, kernel_size=(3,3), activation='relu', padding='same'),
Flatten(),
Dense(units=512, activation="relu"),
Dense(units=64, activation="relu"),
Dense(units=10, activation="softmax")
])
Keras oferuje dwa przydatne sposoby na wizualizację utworzonego modelu. Pierwszym z nich jest metoda summary, która nie tylko pokaże kształty danych wyjściowych na każdej warstwie, ale również dokona kalkulacji złożoności modelu, obliczając ilość parametrów sieci.
model.summary()
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d (Conv2D) (None, 32, 32, 64) 1792
_________________________________________________________________
conv2d_1 (Conv2D) (None, 32, 32, 64) 36928
_________________________________________________________________
max_pooling2d (MaxPooling2D) (None, 16, 16, 64) 0
_________________________________________________________________
conv2d_2 (Conv2D) (None, 16, 16, 32) 18464
_________________________________________________________________
conv2d_3 (Conv2D) (None, 16, 16, 32) 9248
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 8, 8, 32) 0
_________________________________________________________________
conv2d_4 (Conv2D) (None, 8, 8, 16) 4624
_________________________________________________________________
conv2d_5 (Conv2D) (None, 8, 8, 16) 2320
_________________________________________________________________
flatten (Flatten) (None, 1024) 0
_________________________________________________________________
dense (Dense) (None, 512) 524800
_________________________________________________________________
dense_1 (Dense) (None, 64) 32832
_________________________________________________________________
dense_2 (Dense) (None, 10) 650
=================================================================
Total params: 631,658
Trainable params: 631,658
Non-trainable params: 0
_________________________________________________________________
Drugi sposób prezentuje model w formie graficznej, z opcją zaprezentowania kształtów danych wejściowych i wyjściowych.
from tensorflow.keras.utils import plot_model
plot_model(model, 'model_info.png', show_shapes=True)
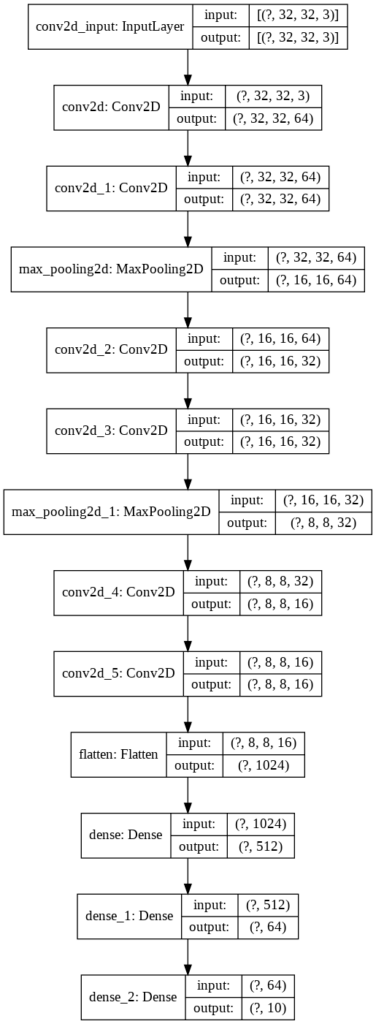
Rysunek 9 – graficzna reprezentacja modelu
Pozostało nam ustalić optymalizator, funkcję straty i metryki, które chcemy gromadzić w trakcie uczenia. Zarówno rodzaj optymalizatora, jak i jego parametry – tu learning rate i momentum – są hiperparametrami modelu. Mogą wpływać na jego zachowanie, szybkość oraz skuteczność uczenia. To oczywiście jedne z wielu hiperparametrów naszej sieci. Sama architektura i złożoność modelu ma już zasadnicze znaczenie dla efektywności sieci. Wielkość filtrów, ich ilość, rodzaj paddingu, funkcje aktywacji, sposób normalizacji danych, rozmiar maxpoolingu – to kolejne parametry. Liczba kombinacji jest naprawdę duża. Warto skorzystać z porad, jakich jest wiele w internecie, i wystartować z parametrami, które ktoś już kiedyś sprawdził i to z dobrymi efektami, a następnie próbować eksperymentalnie poprawiać wyniki.
optim = SGD(lr=0.001, momentum=0.5)
model.compile(optimizer=optim, loss='categorical_crossentropy', metrics=['accuracy'])
Po skompilowaniu modelu możemy wystartować z procesem uczenia. Przy zadanych poniżej parametrach potrwa on od kilku do kilkudziesięciu minut (w wariancie bez GPU). Zwróćcie uwagę, że wynik działania metody fit zwracany jest do obiektu history, który będzie gromadził dane, dzięki czemu będziemy mogli zaprezentować przebieg procesu uczenia. Do metody fit dodałem również parametr validation_split, który określa, jaka część danych uczących jest zarezerwowana na proces walidacji. Proces ten odbywa się po każdej epoce, pokazując jakie efekty proces uczenia na zbiorze treningowym daje na zbiorze walidacyjnym (którego sieć nie widziała w trakcie uczenia się w tej epoce).
history = model.fit(
x_train,
to_categorical(y_train),
epochs=80,
validation_split=0.15,
verbose=1
)
Ostateczna weryfikacja odbywa się na zbiorze testowym, którego sieć uprzednio nie widziała:
eval = model.evaluate(x_test, to_categorical(y_test))
eval
>>> [1.6473742815971375, 0.6954]
Jak widać, dzięki użyciu sieci konwolucyjnej udało nam się zwiększyć poprawność klasyfikacji z 47% do blisko 70%.
Ciekawe rzeczy można zaobserwować korzystając z danych zebranych w obiekcie history:
plt.plot(history.history['accuracy'])
plt.plot(history.history['val_accuracy'])
plt.title('Model accuracy')
plt.ylabel('Accuracy')
plt.xlabel('Epoch')
plt.legend(['Train', 'Validation'], loc='upper left')
plt.show()
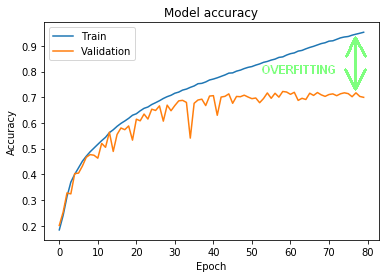
Rysunek 10 – proces nauki i overfitting
Na rysunku 10. mamy zaprezentowane wyniki uczenia na zbiorze treningowym (linia niebieska) oraz wynik na zbiorze walidacyjnym (linia pomarańczowa). Jak widać, już w okolicach 15 epoki oba zbiory zaczęły uzyskiwać inne wyniki. Poprawność klasyfikacji zbioru uczącego stopniowo rosła do samego końca, osiągając pod koniec wartości w okolicach 95%. Tymczasem walidacja poradziła sobie dużo gorzej. Tak samo zbiór testowy.
Co to oznacza? Otóż mamy tu do czynienia ze zjawiskiem overfittingu (oznaczonym przeze mnie na rysunku 10. zieloną strzałką): sieć w procesie nauki doskonale nauczyła się rozpoznawać obiekty ze zbioru uczącego, ale nie potrafiła zgeneralizować nauki w taki sposób, aby równie poprawnie klasyfikować obiekty uprzednio niewidziane. Nie jest to dobra wiadomość, bo sieć nie poradzi sobie dobrze z danymi spoza procesu nauki. Na szczęście jest kilka technik, które zmniejszają overfitting – zajmiemy się nimi w trzeciej części tutoriala.
Masz pytanie? Zadaj je w komentarzu.
Spodobał ci się post? Będzie mi miło, gdy go polecisz.
Do zobaczenia wkrótce, przy okazji omawiania innego ciekawego tematu!
Anonim
7 sierpnia 2020at11:32Witam, wartości filtrów w tensorflow są losowo wybierane? Jeśli tak, to nie wypadałoby np. ustawić ich wartość np. na wartość filtra Sobel, aby uzyskać obraz (mapę cech) z bardziej 'wytłuszczonymi’ krawędziami?
AI Geek Programmer
16 sierpnia 2020at20:19Jeżeli chcemy uzyskać konkretny efekt wizualny, np. wyróżnienie krawędzi lub rozmycie, to filtry ustawimy na konkretną wartość. Jeżeli jednak mówimy o uczeniu sieci konwolucyjnej , to algorytm uczący dobiera odpowiednie filtry, a nie my jako zlecający uczenie. Filtry są inicjowane losowo i dalej to algorytm propagacji wstecznej decyduje, które wartości filtrów dają najlepsze rezultaty klasyfikacji. W konsekwencji wygląd obrazka po konwolucji zrealizowanej przez maszynę często niewiele mówi ludzkiemu oku, ale za to w jakiś sposób jest istotny dla wyniku działania sieci neuronowej.
Anonim
7 sierpnia 2020at11:50Chciałbym również dopytać o to
„rozmiar filtra:5×5, ilość filtrów: 16” << wnioskuje po tym, że wartości filtrów w tensorflow są jednak generowane losowo.
Pytanie dlaczego? Dlaczego generujemy 16 map cech stosująć właściwie filtry wypełnione wartościami losowymi skoro w artykułach naukowych są już opracowane poszczególne wartości tych filtrów? Jaki ma to sens matematyczny tworzyć obraz wyjściowy z losowo wygenerowanym filtrem?? W ten sposób chyba spada dokładność?
Ale z drugiej stony…. gdybyśmy mieli zastosować 16 filtrów powszechnie nam znanych np. box blur, sharpen, gaussian blur (https://ujwlkarn.files.wordpress.com/2016/08/screen-shot-2016-08-05-at-11-03-00-pm.png?w=342&h=562) , to przy kilkuset filtrach i tak część z nich miałaby wartości losowe. Dlaczego nie stosować tylko jednego filtra np. z edge detection zamiast kilkunastu filtrów z różnymi wartościami, przecież chodzi nam o uzyskanie krawędzi cyfr?
AI Geek Programmer
16 sierpnia 2020at20:26Tak, filtry są generowane losowo. Przyczyna została podana w komentarzu powyżej. Parafrazując, jeżeli to człowiek miałby rozpoznawać co jest na obrazkach, to pewnie filtr sharpen nieco by to uprościł. Jednak konwolucja nie jest stosowana tu po to, aby to człowiek mógł rozpoznać obrazek, tylko po to, aby sieć neuronowa, w jakiś tam tylko jej znany sposób jak najlepiej sklasyfikowała obrazki. O odpowiednie ustawienie wartości filtrów dba algorytm propagacji wstecznej modyfikując wartości filtrów w procesie minimalizacji błędu.
Po jest ich 16? Któreś z nich okażą się w procesie nauki bardziej efektywne niż inne i te będą miały większy wpływ na wynik działania sieci. Przy jednym filtrze byłoby to wg mnie trochę jak stawianie na jedną kartę.